Math
Dot product
The dot product supplies as measure of the difference between the direction in which the two vectors point. The dot product of two vectors is given by sum of the products of each component.
How to calculate
A • B = (A.x * B.x) + (A.y * B.y) + (A.z * B.z)
Angle between vectors
A • B = |A| * |B| cos(rad)
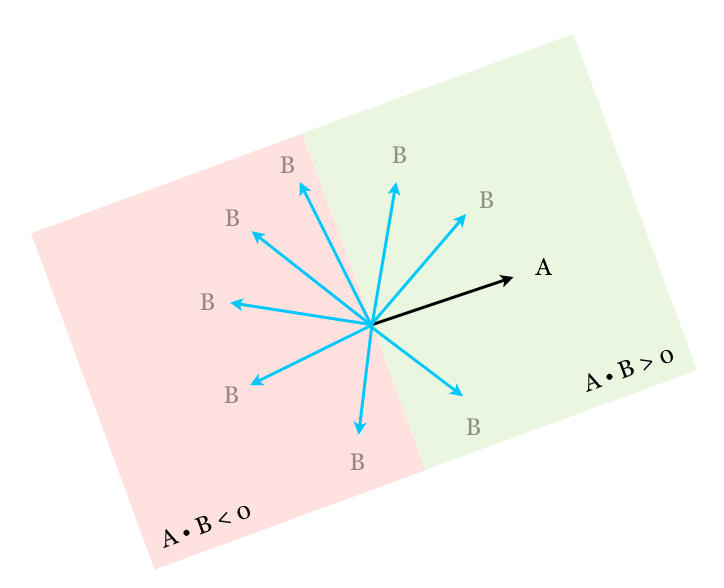
- A and P are perpendicular when: A • B = 0 (orthogonal)
- The sign tells us how close the vectors are pointing in the same direction
- When we consider a plane, passing through the origin and perpendicular to a vector A, then any vector lying on the same side of the plane as A will give a positive dot product, when it's lying on the opposite side, it will give a negative dot product.
Calculating a perpendicular vector based on another one
Sam Hocevar wrote an excellent article on how to get an perpendicular vector based on another one. You can read the article here
// - the current vector does not need to be normalized // - does not normalize the output // - works when the vector is non-zero Vec3 orthogonal(Vec3 v) { return abs(v.x) > abs(v.z) ? vec3(-v.y, v.x, 0.0) : vec3(0.0, -v.z, v.y); }
**Convert one range of number to another range*** Lets say you have one range of values between -100 and 300 (A and B), and another range between 400 and 500 (C and D), then you can convert a value (V) from the first range to the second range using:
value = ((V-A) / (B - A)) * (D - C) + C
Rotating, positioning and scaling a 3D model to two 3D points
Lets say you have a 3D model in unit size and two 3D points and you want to position, rotate and scale the 3D model in such a way that it aligns with the vector between the two points. I had to find a solution for this when I had to draw cylinders between two arbitrary points.
I'll describe the solution I used to position, scale, rotate a 3D cylinder with two points. Lets say you have two points A and B. To create a model matrix that will position your model in such a way that it correctly starts drawing at point A and scales length of the cylinder so it touches B, you need to rotate, scale and position. First lets look how to rotate. The model matrix contains all the operations that are needed to draw your 3D model at any position, scale and rotation that you want. The indices of the matrix have a specific meaning:
Assume m is a martrix 4x4, these are the axis of a identity matrix
// The X-axis m[0] = 1.0; m[1] = 0.0; m[2] = 0.0; // The Y-axis m[4] = 0.0; m[5] = 1.0; m[6] = 0.0; // The Z-axis m[8] = 0.0; m[9] = 0.0; m[10] = 1.0;
The above indices form what I call the Orientation Matrix, also called a LookAt matrix. Basically the values for the separate axis are used to draw those orientation arrows in 3D software:
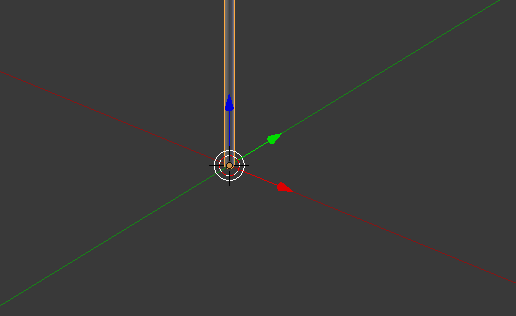
First thing we need to do is decide what axis we want to align with our direction vector. In my case I wanted to align the up vector of my 3D model with the direction vector (B-A), which was the Y-axis. So this simply becomes:
Vec3 y_axis = (b-a);
The next steps are getting the perpendicular axis of this direction vector which will make the X-axis (or z-axis, but those lie in the same plane and are interchangeable in my case). Once we have the y_axis and the x_axis we use the cross product to give us a perpendicular axis of these two. As you might know all the axis of a orientation matrix are perpendicular. So to get all the axis, we use:
Vec3 y_axis = (b-a); // this is the direction vector onto which we want to align the up vector (y-axis) of our model Vec3 x_axis = abs(y_axis.x) > abs(y_axis.z) ? Vec3(-y_axis.y, y_axis.x, 0.0) : Vec3(0.0, -y_axis.z, y_axis.y); // this gets us a perpendicular vector of the y-axis, which we call x-axis (we can exchange x-axis <> z-axis here) Vec3 z_axis = cross(x_axis, y_axis); // we cross the x and y axis to get z-axis.
MAKE SURE TO NORMALIZE THE AXIS! and create the model matrix
When you don't normalize the axis the axis will also have a scaling factor; as I don't want that I'm normalizing them. If you do want to take the scale into account then simply omit the normalize operations. Once we have the 3 axis, we simply fill in our matrix. Indices 12, 13 and 14 are used for the position.
Mat4 m; m[0] = x_axis.x; m[1] = x_axis.y; m[2] = x_axis.z; // x-axis m[4] = y_axis.x; m[5] = y_axis.y; m[6] = y_axis.z; // y-axis m[8] = z_axis.x; m[9] = z_axis.y; m[10] = z_axis.z; // z-axis m[12] = a.x; m[13] = a.y; m[14] = a.z; // a = start position
All code combined (using v1,v2,v3 for the axis)
// v1 = x-axis, v2 = y-axis, v3 = z-axis Vec3 v2 = (b-a); Vec3 v1 = abs(v2.x) > abs(v2.z) ? Vec3(-v2.y, v2.x, 0.0) : Vec3(0.0, -v2.z, v2.y); Vec3 v3 = cross(v1, v2); float len = v2.length(); // scale the Y direction of the cylinder v1.normalize(); v2.normalize(); v3.normalize(); v2 *= len * 0.5; Mat4 m; m[0] = v1.x; m[1] = v1.y; m[2] = v1.z; // x-axis m[4] = v2.x; m[5] = v2.y; m[6] = v2.z; // y-axis m[8] = v3.x; m[9] = v3.y; m[10] = v3.z; // z-axis m[12] = a.x; m[13] = a.y; m[14] = a.z; // position
Step to a certain value
This will step to values of 0.01:
float step = 0.01; float value = 3.346; value = floorf( (value/step) + 0.5 ) * step;
References:
 NAT Types
NAT Types
 Building Cabinets
Building Cabinets
 Compiling GStreamer from source on Windows
Compiling GStreamer from source on Windows
 Debugging CMake Issues
Debugging CMake Issues
 Dual Boot Arch Linux and Windows 10
Dual Boot Arch Linux and Windows 10
 Mindset Updated Edition, Carol S. Dweck (Book Notes)
Mindset Updated Edition, Carol S. Dweck (Book Notes)
 How to setup a self-hosted Unifi NVR with Arch Linux
How to setup a self-hosted Unifi NVR with Arch Linux
 Blender 2.8 How to use Transparent Textures
Blender 2.8 How to use Transparent Textures
 Compiling FFmpeg with X264 on Windows 10 using MSVC
Compiling FFmpeg with X264 on Windows 10 using MSVC
 Blender 2.8 OpenGL Buffer Exporter
Blender 2.8 OpenGL Buffer Exporter
 Blender 2.8 Baking lightmaps
Blender 2.8 Baking lightmaps
 Blender 2.8 Tips and Tricks
Blender 2.8 Tips and Tricks
 Setting up a Bluetooth Headset on Arch Linux
Setting up a Bluetooth Headset on Arch Linux
 Compiling x264 on Windows with MSVC
Compiling x264 on Windows with MSVC
 C/C++ Snippets
C/C++ Snippets
 Reading Chunks from a Buffer
Reading Chunks from a Buffer
 Handy Bash Commands
Handy Bash Commands
 Building a zero copy parser
Building a zero copy parser
 Kalman Filter
Kalman Filter
 Saving pixel data using libpng
Saving pixel data using libpng
 Compile Apache, PHP and MySQL on Mac 10.10
Compile Apache, PHP and MySQL on Mac 10.10
 Fast Pixel Transfers with Pixel Buffer Objects
Fast Pixel Transfers with Pixel Buffer Objects
 High Resolution Timer function in C/C++
High Resolution Timer function in C/C++
 Rendering text with Pango, Cairo and Freetype
Rendering text with Pango, Cairo and Freetype
 Fast OpenGL blur shader
Fast OpenGL blur shader
 Spherical Environment Mapping with OpenGL
Spherical Environment Mapping with OpenGL
 Using OpenSSL with memory BIOs
Using OpenSSL with memory BIOs
 Attributeless Vertex Shader with OpenGL
Attributeless Vertex Shader with OpenGL
 Circular Image Selector
Circular Image Selector
 Decoding H264 and YUV420P playback
Decoding H264 and YUV420P playback
 Fast Fourier Transform
Fast Fourier Transform
 OpenGL Rim Shader
OpenGL Rim Shader
 Rendering The Depth Buffer
Rendering The Depth Buffer
 Delaunay Triangulation
Delaunay Triangulation
 RapidXML
RapidXML
 Git Snippets
Git Snippets
 Basic Shading With OpenGL
Basic Shading With OpenGL
 Open Source Libraries For Creative Coding
Open Source Libraries For Creative Coding
 Bouncing particle effect
Bouncing particle effect
 OpenGL Instanced Rendering
OpenGL Instanced Rendering
 Mapping a texture on a disc
Mapping a texture on a disc
 Download HTML page using CURL
Download HTML page using CURL
 Height Field Simulation on GPU
Height Field Simulation on GPU
 OpenCV
OpenCV
 Some notes on OpenGL
Some notes on OpenGL
 Math
Math
 Gists to remember
Gists to remember
 Reverse SSH
Reverse SSH
 Working Set
Working Set
 Consumer + Producer model with libuv
Consumer + Producer model with libuv
 Parsing binary data
Parsing binary data
 C++ file operation snippets
C++ file operation snippets
 Importance of blur with image gradients
Importance of blur with image gradients
 Real-time oil painting with openGL
Real-time oil painting with openGL
 x264 encoder
x264 encoder
 Generative helix with openGL
Generative helix with openGL
 Mini test with vector field
Mini test with vector field
 Protractor gesture recognizer
Protractor gesture recognizer
 Hair simulation
Hair simulation
 Some glitch screenshots
Some glitch screenshots
 Working on video installation
Working on video installation
 Generative meshes
Generative meshes
 Converting video/audio using avconv
Converting video/audio using avconv
 Auto start terminal app on mac
Auto start terminal app on mac
 Export blender object to simple file format
Export blender object to simple file format