OpenCV
Optical Flow
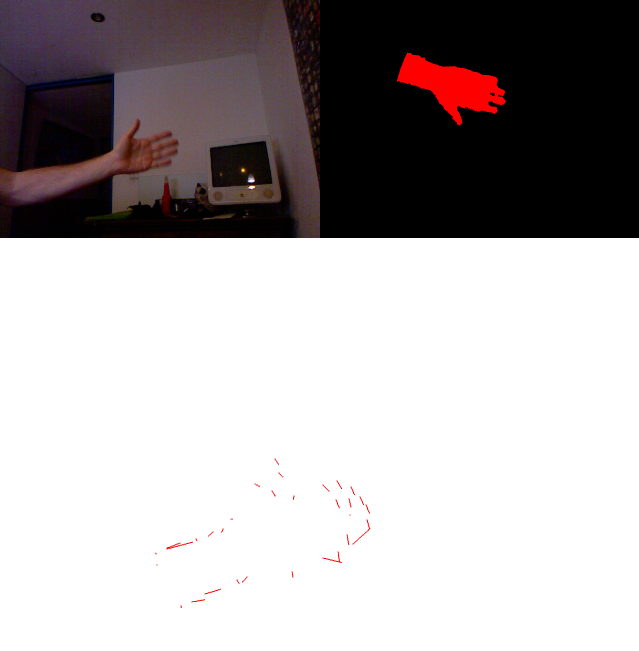
Example that uses cv::calcOpticalFlowPyrLK() to calculate the optical
flow between good trackable points.
Flow.cpp
#include <assert.h> #include <swnt/Flow.h> #include <swnt/Settings.h> #include <swnt/Graphics.h> Flow::Flow(Settings& settings, Graphics& graphics) :settings(settings) ,graphics(graphics) ,prev_image(NULL) ,field_vao(0) ,field_vbo(0) ,field_bytes_allocated(0) { } bool Flow::setup() { size_t nbytes = settings.image_processing_w * settings.image_processing_h ; prev_image = new unsigned char[nbytes]; if(!prev_image) { printf("Error: cannot allocate the bytes for the previous image.\n"); return false; } memset(prev_image, 0x00, nbytes); if(!setupGraphics()) { printf("Error: cannot setup the GL state in Flow.\n"); return false; } return true; } bool Flow::setupGraphics() { glGenVertexArrays(1, &field_vao); glBindVertexArray(field_vao); glGenBuffers(1, &field_vbo); glBindBuffer(GL_ARRAY_BUFFER, field_vbo); glEnableVertexAttribArray(0); // pos glVertexAttribPointer(0, 2, GL_FLOAT, GL_FALSE, sizeof(vec2), (GLvoid*)0); // pos return true; } void Flow::draw(){ if(field_vertices.size()) { glBindVertexArray(field_vao); glUseProgram(graphics.v_prog); vec3 color(1.0, 0.0, 0.0); mat4 mm; mm.translate(0, 240.0, 0); glUniform3fv(glGetUniformLocation(graphics.v_prog, "u_color"), 1, color.ptr()); glUniformMatrix4fv(glGetUniformLocation(graphics.v_prog, "u_mm"), 1, GL_FALSE, mm.ptr()); glUniformMatrix4fv(glGetUniformLocation(graphics.v_prog, "u_pm"), 1, GL_FALSE, settings.ortho_matrix.ptr()); glDrawArrays(GL_LINES, 0, field_vertices.size()); glDrawArrays(GL_POINTS, 0, field_vertices.size()); } } /* This function will find good points to track in the previous frame and then tries to find those points in the current image (curr). The first time this function is ran we get wrong results as there is no "previous" image from which we can get good points to track. After finding good features in the previous frame, we use cv::calcOpticalFlowPyrLK to find those points in the current image. */ void Flow::calc(unsigned char* curr) { assert(prev_image); prev_good_points.clear(); curr_good_points.clear(); status.clear(); int w = settings.image_processing_w; int h = settings.image_processing_h; size_t nbytes = w * h; cv::Mat mat_curr(h, w, CV_8UC1, curr, cv::Mat::AUTO_STEP); cv::Mat mat_prev(h, w, CV_8UC1, prev_image, cv::Mat::AUTO_STEP); cv::goodFeaturesToTrack(mat_prev, // input, the image from which we want to know good features to track prev_good_points, // output, the points will be stored in this output vector 40, // max points, maximum number of good features to track 0.05, // quality level, "minimal accepted quality of corners", the lower the more points we will get 10, // minDistance, minimum distance between points cv::Mat(), // mask 4, // block size false, // useHarrisDetector, makes tracking a bit better when set to true 0.04 // free parameter for harris detector ); if(!prev_good_points.size()) { memcpy(prev_image, curr, nbytes); return; } cv::TermCriteria termcrit(cv::TermCriteria::COUNT|cv::TermCriteria::EPS,prev_good_points.size(),0.03); std::vector<float> error; curr_good_points.assign(prev_good_points.size(), cv::Point2f()); cv::calcOpticalFlowPyrLK(mat_prev, // prev image mat_curr, // curr image prev_good_points, // find these points in the new image curr_good_points, // result of found points status, // output status vector, found points are set to 1 error, // each point gets an error value (see flag) cv::Size(21, 21), // size of the window at each pyramid level 0, // maxLevel - 0 = no pyramids, > 0 use this level of pyramids termcrit, // termination criteria 0, // flags OPTFLOW_USE_INITIAL_FLOW or OPTFLOW_LK_GET_MIN_EIGENVALS 0.1 // minEigThreshold ); updateFieldVertices(); memcpy(prev_image, curr, nbytes); } void Flow::updateFieldVertices() { field_vertices.clear(); if(!curr_good_points.size()) { return; } if(curr_good_points.size() != prev_good_points.size()) { printf("not same size.\n"); return; } for(size_t i = 0; i < curr_good_points.size(); ++i) { if(!status[i]) { continue; } cv::Point2f& c = curr_good_points[i]; cv::Point2f& p = prev_good_points[i]; vec2 v(p.x, p.y); field_vertices.push_back(v); v.set(c.x, c.y); field_vertices.push_back(v); } glBindBuffer(GL_ARRAY_BUFFER, field_vbo); size_t bytes_needed = sizeof(vec2) * field_vertices.size(); if(bytes_needed > field_bytes_allocated) { glBufferData(GL_ARRAY_BUFFER, bytes_needed, field_vertices[0].ptr(), GL_STREAM_DRAW); field_bytes_allocated = bytes_needed; } else { glBufferSubData(GL_ARRAY_BUFFER, 0, bytes_needed, field_vertices[0].ptr()); } }
Flow.h
#ifndef SWNT_FLOW_H #define SWNT_FLOW_H #include <opencv2/core/core.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/video/tracking.hpp> #define ROXLU_USE_OPENGL #define ROXLU_USE_MATH #define ROXLU_USE_PNG #include "tinylib.h" class Settings; class Graphics; class Flow { public: Flow(Settings& settings, Graphics& graphics); bool setup(); void calc(unsigned char* curr); void draw(); private: bool setupGraphics(); void updateFieldVertices(); /* update the vertices that are used to draw the vector field */ public: Settings& settings; Graphics& graphics; unsigned char* prev_image; std::vector<cv::Point2f> prev_good_points; std::vector<cv::Point2f> curr_good_points; std::vector<unsigned char> status; /* GL */ GLuint field_vao; GLuint field_vbo; std::vector<vec2> field_vertices; size_t field_bytes_allocated; }; #endif
Example
 NAT Types
NAT Types
 Building Cabinets
Building Cabinets
 Compiling GStreamer from source on Windows
Compiling GStreamer from source on Windows
 Debugging CMake Issues
Debugging CMake Issues
 Dual Boot Arch Linux and Windows 10
Dual Boot Arch Linux and Windows 10
 Mindset Updated Edition, Carol S. Dweck (Book Notes)
Mindset Updated Edition, Carol S. Dweck (Book Notes)
 How to setup a self-hosted Unifi NVR with Arch Linux
How to setup a self-hosted Unifi NVR with Arch Linux
 Blender 2.8 How to use Transparent Textures
Blender 2.8 How to use Transparent Textures
 Compiling FFmpeg with X264 on Windows 10 using MSVC
Compiling FFmpeg with X264 on Windows 10 using MSVC
 Blender 2.8 OpenGL Buffer Exporter
Blender 2.8 OpenGL Buffer Exporter
 Blender 2.8 Baking lightmaps
Blender 2.8 Baking lightmaps
 Blender 2.8 Tips and Tricks
Blender 2.8 Tips and Tricks
 Setting up a Bluetooth Headset on Arch Linux
Setting up a Bluetooth Headset on Arch Linux
 Compiling x264 on Windows with MSVC
Compiling x264 on Windows with MSVC
 C/C++ Snippets
C/C++ Snippets
 Reading Chunks from a Buffer
Reading Chunks from a Buffer
 Handy Bash Commands
Handy Bash Commands
 Building a zero copy parser
Building a zero copy parser
 Kalman Filter
Kalman Filter
 Saving pixel data using libpng
Saving pixel data using libpng
 Compile Apache, PHP and MySQL on Mac 10.10
Compile Apache, PHP and MySQL on Mac 10.10
 Fast Pixel Transfers with Pixel Buffer Objects
Fast Pixel Transfers with Pixel Buffer Objects
 High Resolution Timer function in C/C++
High Resolution Timer function in C/C++
 Rendering text with Pango, Cairo and Freetype
Rendering text with Pango, Cairo and Freetype
 Fast OpenGL blur shader
Fast OpenGL blur shader
 Spherical Environment Mapping with OpenGL
Spherical Environment Mapping with OpenGL
 Using OpenSSL with memory BIOs
Using OpenSSL with memory BIOs
 Attributeless Vertex Shader with OpenGL
Attributeless Vertex Shader with OpenGL
 Circular Image Selector
Circular Image Selector
 Decoding H264 and YUV420P playback
Decoding H264 and YUV420P playback
 Fast Fourier Transform
Fast Fourier Transform
 OpenGL Rim Shader
OpenGL Rim Shader
 Rendering The Depth Buffer
Rendering The Depth Buffer
 Delaunay Triangulation
Delaunay Triangulation
 RapidXML
RapidXML
 Git Snippets
Git Snippets
 Basic Shading With OpenGL
Basic Shading With OpenGL
 Open Source Libraries For Creative Coding
Open Source Libraries For Creative Coding
 Bouncing particle effect
Bouncing particle effect
 OpenGL Instanced Rendering
OpenGL Instanced Rendering
 Mapping a texture on a disc
Mapping a texture on a disc
 Download HTML page using CURL
Download HTML page using CURL
 Height Field Simulation on GPU
Height Field Simulation on GPU
 OpenCV
OpenCV
 Some notes on OpenGL
Some notes on OpenGL
 Math
Math
 Gists to remember
Gists to remember
 Reverse SSH
Reverse SSH
 Working Set
Working Set
 Consumer + Producer model with libuv
Consumer + Producer model with libuv
 Parsing binary data
Parsing binary data
 C++ file operation snippets
C++ file operation snippets
 Importance of blur with image gradients
Importance of blur with image gradients
 Real-time oil painting with openGL
Real-time oil painting with openGL
 x264 encoder
x264 encoder
 Generative helix with openGL
Generative helix with openGL
 Mini test with vector field
Mini test with vector field
 Protractor gesture recognizer
Protractor gesture recognizer
 Hair simulation
Hair simulation
 Some glitch screenshots
Some glitch screenshots
 Working on video installation
Working on video installation
 Generative meshes
Generative meshes
 Converting video/audio using avconv
Converting video/audio using avconv
 Auto start terminal app on mac
Auto start terminal app on mac
 Export blender object to simple file format
Export blender object to simple file format